I’m posting late yet again. I seem to be making a habit of it, hopefully I’ll pull myself together eventually, but I’m going to back off on my goal of a weekly post for a bit. For now, I’m going to talk group theory and physics, as the title suggests. We’ll begin with the math.
Generally, when people talk about group theory in the context of physics, what they have in mind is representation theory. In fact, the Standard Model is built on the edifice of representations of Lie Groups. However, we’re going to talk about finite groups.
So the question is what is a representation? Turns out, this is simple. Let  be a finite dimensional vector space over
be a finite dimensional vector space over  and let
and let  be a group. Then a representation of on is a homomorphism
be a group. Then a representation of on is a homomorphism  . We then say that the representation of has dimension
. We then say that the representation of has dimension  . Another way to think about it is that a representation of is an action of on a vector space . From here on, we will think of group elements as being the same as linear operators on .
. Another way to think about it is that a representation of is an action of on a vector space . From here on, we will think of group elements as being the same as linear operators on .
Our representation  is reducible if there is a proper subspace
is reducible if there is a proper subspace  such that
such that  . Otherwise it is irreducible. Also, the direct sum of two representations
. Otherwise it is irreducible. Also, the direct sum of two representations  is a representation
is a representation  which projects to the original representations. A wonderful theorem of representation theory is that every representation of a finite group is that every representation is equivalent to a direct sum of irreducibles, so we only need to understand the irreducible ones. (Here, equivalent means that they are the same up to a change of basis.)
which projects to the original representations. A wonderful theorem of representation theory is that every representation of a finite group is that every representation is equivalent to a direct sum of irreducibles, so we only need to understand the irreducible ones. (Here, equivalent means that they are the same up to a change of basis.)
Now that we know what a representation is, we define the character of a representation to be the function  that takes an element
that takes an element  to
to  . A cool fact about characters is that given two representations
. A cool fact about characters is that given two representations  , then
, then  if and only if
if and only if  . Another cool fact is the orthogonality relation, that is,
. Another cool fact is the orthogonality relation, that is,  , so this sum is the order of the group if the characters are the same, but is zero otherwise!
, so this sum is the order of the group if the characters are the same, but is zero otherwise!
Characters have other good properties too. For one thing, they are constant on conjugacy classes, and so we can compute them if we only have one element from each class. Better, if we know the characters of the irreducible representations, and of a specific representation, we can use them to decompose it, because that character will just be a sum of the irreducible characters.
Direct sums let us break up a representation into smaller ones, and there’s another operation, called the tensor product, that allows us to build two representations into a bigger one. In fact, if has dimension  and
and  has dimension
has dimension  , then
, then  has dimension
has dimension  . I’m not going to go into the details of tensor products right now, but I will say one thing: the character of a tensor product is the product of the characters. That is,
. I’m not going to go into the details of tensor products right now, but I will say one thing: the character of a tensor product is the product of the characters. That is,  . This allows us to break up tensor products whenever we need to.
. This allows us to break up tensor products whenever we need to.
We need one last thing before doing some physics, and that’s the projection operator. As we can use characters to break up a representation into irreducibles, the projection operator will be the operator that maps the whole representation space onto the subspace that is invariant under a specific irreducible representation. Characters give us a decent formula for this, which is  , where
, where  is the number of times the irreducible representation appears.
is the number of times the irreducible representation appears.
And with that, it’s on to the physics!
Consider the “simple” physical system of three identical masses connected by three identical springs in an equilateral triangle (this example can actually be done for masses and springs in a regular -gon). What are the normal modes of this system? We will solve this problem mostly by looking at how the system can transform, ie, its symmetries. The symmetry group of an equilateral triangle is known as  , and so this is the group we will be looking at. The system has six degrees of freedom, the
, and so this is the group we will be looking at. The system has six degrees of freedom, the  and
and  coordinates of each block. We can break this up into a two dimensional space
coordinates of each block. We can break this up into a two dimensional space  and a three dimensional space (the blocks) which must transform according to , so we will need a two and a three dimensional representation of the group.
and a three dimensional space (the blocks) which must transform according to , so we will need a two and a three dimensional representation of the group.
Before continuing, we need to look at the group in more detail. consists of six elements, which can be written as permutations in cycle form as  , which multiplication table given by composition of permutations. Now we can describe the two representations we need, call them
, which multiplication table given by composition of permutations. Now we can describe the two representations we need, call them  and
and  , for the dimensions. is actually given by three by three permutation matrices, which I will not bother to write out, so that leaves , which is described below:
, for the dimensions. is actually given by three by three permutation matrices, which I will not bother to write out, so that leaves , which is described below:


It turns out that only has three irreducible representations: the trivial representation (which character identically 1), the alternating representation (which character 1 except on  where is is
where is is  ) and . So now we take the tensor product
) and . So now we take the tensor product  and get a six dimensional representation. Without showing you the gory details, I’m going to assert that this has character equal to 6 on the identity and zero elsewhere, and so this representation contains the trivial one once, the alternating one once, and twice. So the projectors onto the two one-dimensional represnetations will be one dimensional.
and get a six dimensional representation. Without showing you the gory details, I’m going to assert that this has character equal to 6 on the identity and zero elsewhere, and so this representation contains the trivial one once, the alternating one once, and twice. So the projectors onto the two one-dimensional represnetations will be one dimensional.
Again, sparing you the gory details, these two projectors can be factored into a column vector multiplied by its transpose, specifically we get  . Recalling that the coordinates come in pairs for each mass, this is the “breathing mode” where the triangle grows and shrinks. For
. Recalling that the coordinates come in pairs for each mass, this is the “breathing mode” where the triangle grows and shrinks. For  , we get the vector
, we get the vector  , which is the rotational mode.
, which is the rotational mode.
So there are two normal modes for free from the group theory! Now we must use physics, as the projector onto has rank 4, and that’s not so easy to decompose. However, the physics gives us two modes that are easy to determine: translation in the and directions. Subtracting them off, we end up with the six by six matrix
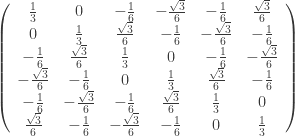
So what do we do to find the normal modes here? There should be two left. Well, we multiply by the vector  to see what happens if we set the bottom mass in motion up. We get
to see what happens if we set the bottom mass in motion up. We get  , which means that the bottom mass is moving up, and the two on top are moving down and out, sort of squashing the triangle flat and then returning. We get another normal mode by doing the same thing but rotated by 120 degrees.
, which means that the bottom mass is moving up, and the two on top are moving down and out, sort of squashing the triangle flat and then returning. We get another normal mode by doing the same thing but rotated by 120 degrees.
And so, we see that group theory gives the normal modes of the spring system. Though I’d love to take credit for this example, it’s from Georgi’s “Lie Algebras in Particle Physics.” I think that next time I’ll get back to geometry, after the last couple of algebraic posts.

Charlie wrote: “Generally, when people talk about group theory in the context of physics, what they have in mind is representation theory. ”
There are other uses of group theory in physics, for instance anti- de Sitter Space is the homogeneous space SO(3,2)/SO(3,1) which can be complexified to the complex spacetime SU(3,2)/SU(3,1) xU(1). Many other models based on group theory are in the literature.
Oooh, I didn’t know that. Looks like it’s time for me to learn about anti-deSitter space. You wouldn’t happen to have a good reference, would you?
Almost everything is in Robert Gilmore’s Lie Groups, Lie algebras and some of their applications. I’ll look for something better.
Gilmore is writing a new book on Lie Groups, the even numbered chapters are at:
http://www.physics.drexel.edu/~bob/LieGroups.html
It may not be the best but it is free (for now)